ロボット/AGVシステムのご紹介
AGV/AMR搬送システム
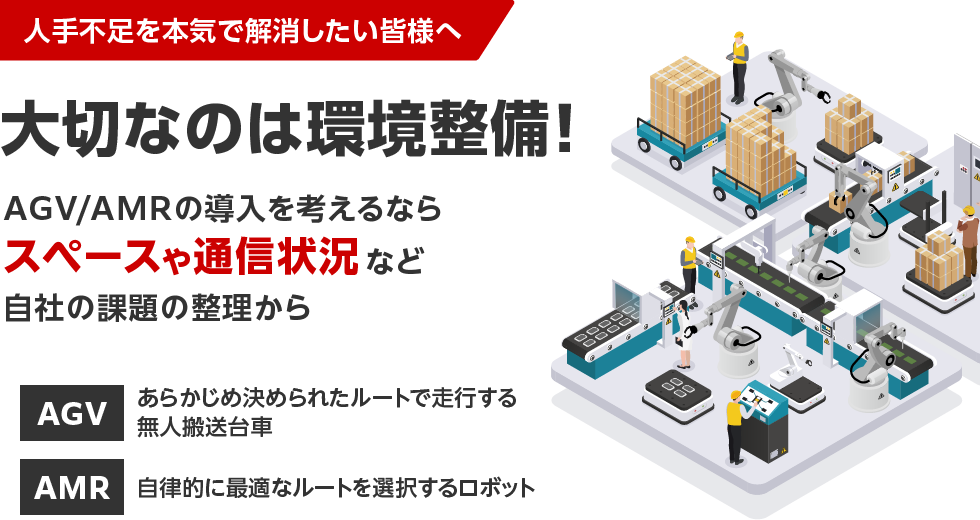
課題と“MELSC”による解決策
課題 A
スペース・レイアウト
スペース・レイアウト
✓ AGV/AMRの走行に必要なスペースの確保
✓ 走行エリアに置かれている資材や製品の整理
✓ パレットの入出庫や大型製品の移動などが多いエリアの対策
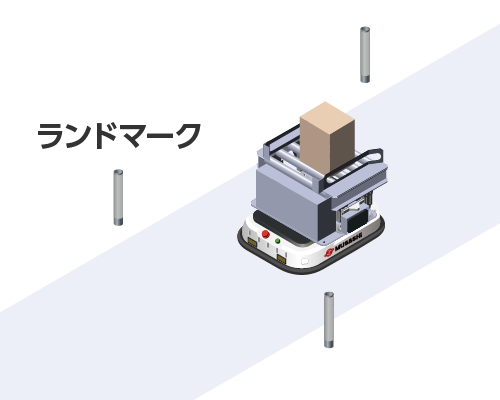
※AGVはLiDARのレーザー光照射による距離測定で位置精度を高めていますが、周囲の環境によってはその精度に影響が出ます。
- 解決策
- 事前調査で走行安定性の信頼度が低下する場所の特定などランドマーク※1設置の必要性を検討いたします。
- 強 み
- 当社では、実際の現地でデモンストレーション走行を行い、走行の安定性を試験します。
※1:ランドマーク:レーザ光反射用ポール
-
レーザー測位
-
ランドマーク
-
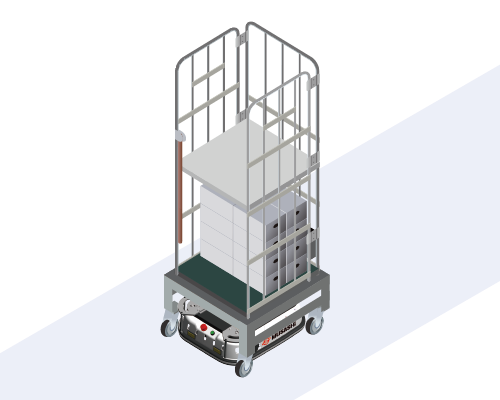
かご台車搬送

-
トレーラ牽引
-
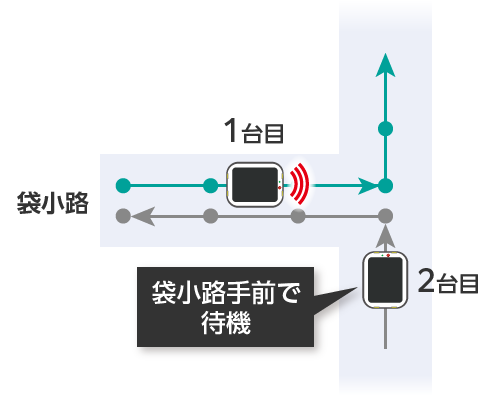
T字路制御
-
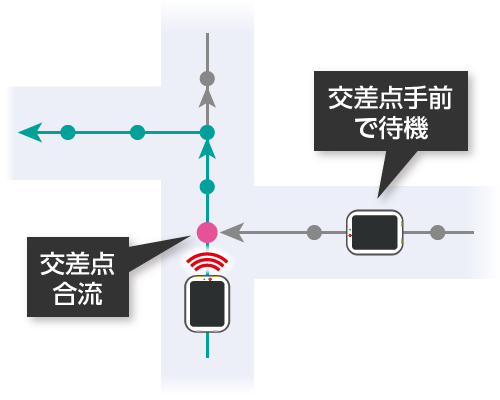
交差点制御
課題 B
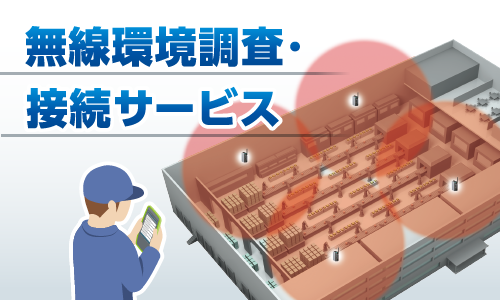
Wi-Fi環境
Wi-Fi環境
✓ AGV/AMRの走行に使えるWi-Fi環境の用意
✓ 安定したAGV/AMRの走行を実現するための、Wi-Fi機器の適切な設置場所
- 解決策
- 移動体通信に強く、高速ローミング機能※2に適用した機器を採用。
アクセスポイントへ高速切替が可能です。(切替時間150ms以内 ※他社製品との通信時は除く)
- 強 み
- 当社では、お客様の電波環境を事前に調査します。
※2:ローミング機能:接続中のアクセスポイントから別のアクセスポイントへ接続先を切り替える機能のこと

課題 C
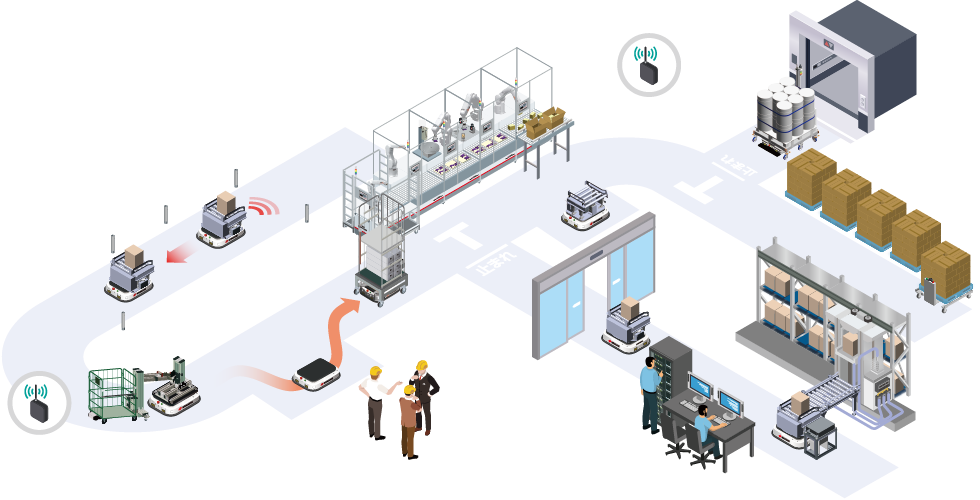
周辺設備
周辺設備
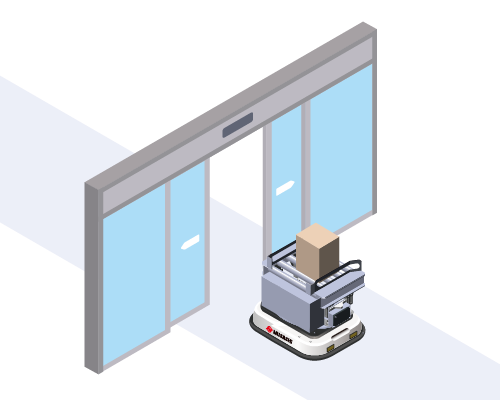
✓ エレベータや自動扉など、周辺設備との連携方法
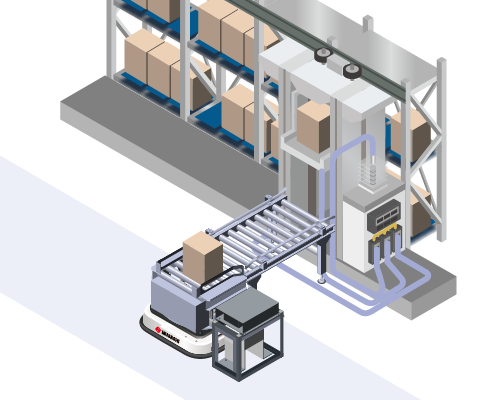
✓ 製造装置間など工程間の搬送の実現方法
- 解決策
- エレベータメーカや設備メーカへ個別に依頼し、各設備とのインタフェースの改造(設計・製作)が必要です。
- 強 み
- 周辺設備メーカとの打ち合わせは当社にお任せください。

-
エレベータ連携・ 自動扉制御
-
自動ドア連携
-
コンベア搬送・ 装置連携
導入事例



垂直搬送事例
-
昇降機を活用した垂直搬送事例の
ご紹介。垂直搬送をする場合は、昇降機メーカでのインタフェースの改造
(設計・製作)が必要です。
昇降機メーカとの打ち合わせは当社にお任せください。

掲載カタログ
2024年9月作成
AGV/AMR搬送システム
ソリューション
2024年9月作成
AGVフリートコントロール
FleeTPaTh
お役立ち資料
事前に検討すべき課題を整理し、
AGV/AMRを上手に導入するためのポイント
をわかりやすく解説しています。