
ロボット/AGVシステムのご紹介
オプション製品
ロボットシステム
ロボットハンドラインナップ(マテハン)
ポイント
エアーチャック、吸着ハンド、電動ハンド、力覚センサ、ビジョンセンサの組合わせが可能です

✓ 現場の課題
- 1.ハンド設計、製作に手間がかかる
- 2.ワークが複雑なため、ハンドの搬送イメージがわからない
- 3.開発品のため、ワークの準備ができない
✓ 解決します
- 1.豊富なノウハウと当社パートナー製品より、最適なハンドをご提案し設計・製作いたします
- 2.3Dモデルによるシミュレーションと実機での検証をもとにご提案いたします
- 3.3Dモデルのシミュレーション及び3Dプリンタを活用したラピッドプロトタイピングにより、
ハンド・ワーク・部材を製作し、迅速高精度な実機試験を実現いたします
ハンド構成一覧
| 品名 | 用途、内容 | とりまとめ |
|---|---|---|
| ハンドフランジ | ロボットフランジ取付け部品(個別設計) | 三菱電機システムサービス 株式会社 |
| フレーム・ブラケット | ハンドフレームなど(個別設計) | |
| 平行チャック、アクチュエータ、シリンダー | 市販品流用 | |
| 吸着パット | 市販品流用 | |
| 電動ハンド | 市販品流用 | |
| マグネット | 市販品流用 | |
| ハンドフィンガー(爪) | ワーク把持部分(個別設計) | |
| 力覚センサ | 組立勘合確認センサなど(市販品) | |
| 電磁弁、エジェクター、エアー継手 | ハンド駆動用のエアー機器など(市販品) | |
| リードスイッチ、近接スイッチ、リミット | 駆動部の動作確認センサーなど(市販品) | |
| ハンドケーブル、端子台 | 駆動機器、確認センサとの電機ケーブル (個別設計) |
※ ハンドはシステム仕様によって大きさ、形状が変更となります。
※ 使用機器につきましてはお客様のご指定に合わせて選択致します。
ティーチングボックスレスアプリケーション
システム概要
三菱電機製タッチパネルでロボットの操作やモニタができます
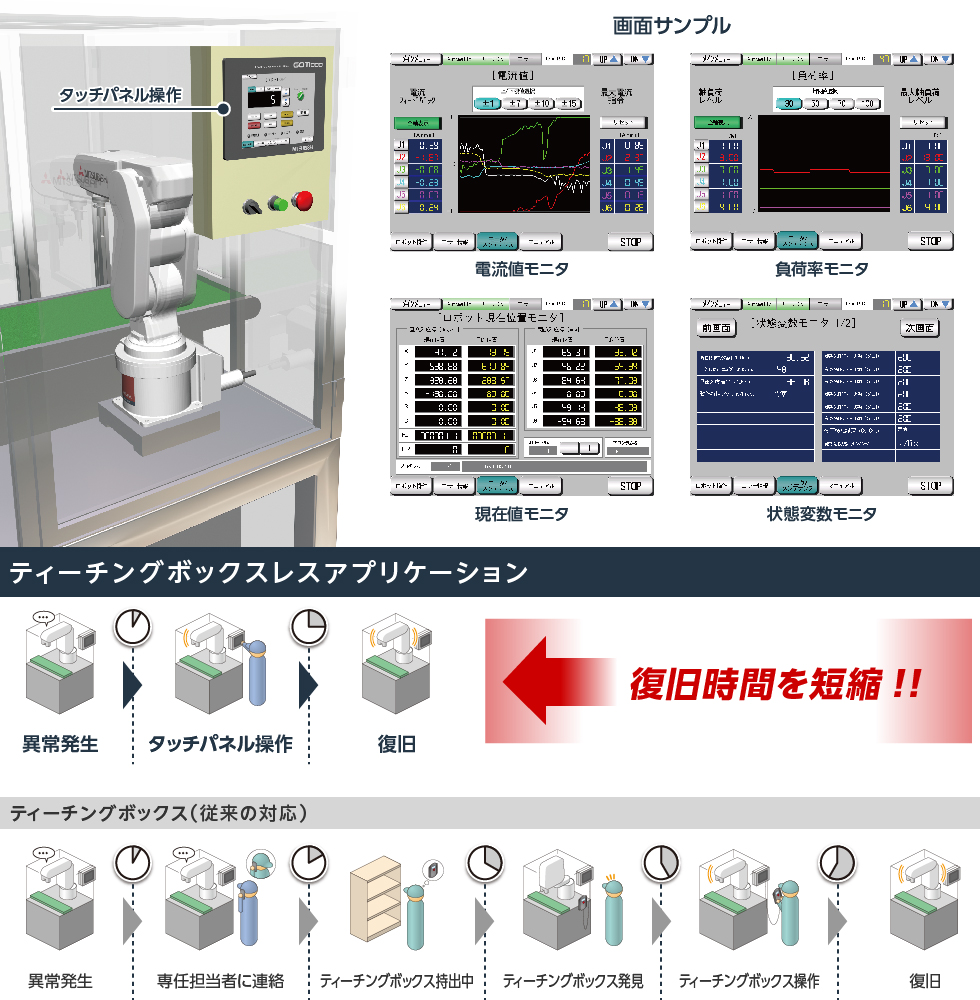
✓ 現場の課題
- 1.緊急時ティーチングボックスがすぐ用意できない
- 2.ティーチングボックスの操作を忘れてしまった
- 3.位置補正するのにティーチングボックスを使うのが面倒
✓ 解決します
- 1.ティーチングボックスがなくても操作できます
- 2.普段使いなれたタッチパネルで操作できます
- 3.タッチパネルによる簡単位置補正ができます
掲載カタログ
2016年5月作成
三菱電機産業用ロボットシステム
ロボットハンドラインナップ